
5 Advantages of Industrial Robotics Technology
Industry 4.0 revolution is cited with the shift from manual manufacturing methods to automated processes....

Modern Industry Robots & Cobots: What’s The Difference?
Robotics is a vast field, with many disciplines and research avenues housed under one umbrella term.....
Robotic process automation in the manufacturing supply chain
Every time there is a topic about Robotic Process Automation (RPA) we often think of human-like robots with circuit boards for brains....
.png)
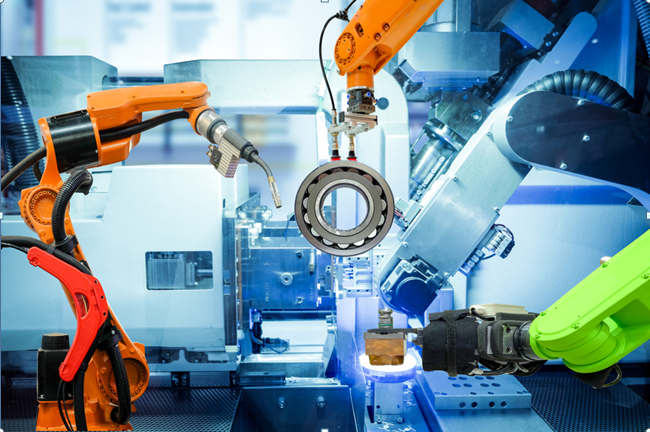
Fascinating Use Cases For Industrial Robotics
Over the last couple of decades, robotics has completely transformed the way manufacturers use technology. Robotics has made manufacturing more efficient by tens of factors and that has become evident in the drastic improvement in the quality of the products that we use......
Robotic Process Automation In Manufacturing and Delivering Covid-19 Vaccines
Over the last couple of years, chaos has reigned our lives with only a few sections of people who have helped us get through it - doctors,nurses, other healthcare workers..
How Robotics Will Change The Construction Industry
In the age of intelligent automation, the construction industry is one of the least automated in the world. It still relies on manual-intensive labour and is reliant on human resources as a primary source of productivity...
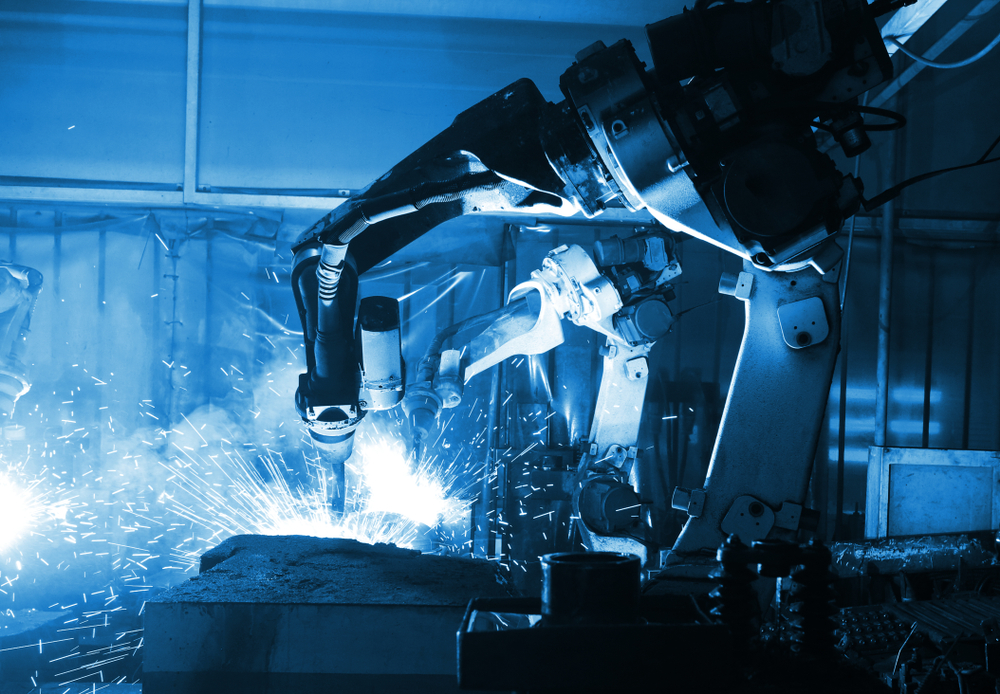
3 Major Robots in the Industrial Sector
The new-age industrial revolution is powered by the large-scale deployment of robots that have been designed to be extremely efficient manufacturing partners...

Top Three Robotics Trends That Will Shape The Next Decade
Robotics has successfully transformed the way our world operates. The industrial revolutions that have accompanied major technological breakthroughs are all set to launch several industries into a new league of development and advancement...
Robotics Process Automation Trends to Watch Out For In 2021
The new-age industrial revolution is powered by the large-scale deployment of robots that have been designed to be extremely efficient manufacturing partners...
How India’s Robots Are Taking Charge Of COVID Care
COVID-19 has created unprecedented changes across the world in everyone’s personal and professional lives...

The Benefits of Using Universal Collaborative Robots
Robots have replaced human labour in crucial and risky factory jobs and the new technology that has been shaping the manufacturing world ...
